|
5.2.1 Reluktanzmotoren
Der Stator besteht aus bewickelten, ausgeprägten Polen.
Die gegenüberliegenden Spulen werden gemeinsam gespeist und bilden eine Phase
mit Nord- und Südpol. Der Rotor ist eine einfache zahnradähnliche Konstruktion
ohne Magnete, Wicklungen und Bürsten. Die Anzahl der Ständerwicklungen ist dabei
stets größer als die Anzahl der Zähne im Läufer, z.B. 6/4, 8/6 oder 24/18.
Dadurch stehen sich nie alle Zähne des Läufers und Spulen des Stators genau
gegenüber.
Beim Reluktanzmotor entsteht die Kraft im Luftspalt zwischen Eisen und Eisen.
Beim Einschalten der entsprechenden Statorwicklungen wirkt auf den Rotor ein
Drehmoment, welches von der magnetischen Anziehungskraft zwischen Stator- und
Rotorpol herrührt.
Vorteile:
Sie liegen im einfachen und robusten Aufbau von Statorwicklung und Rotor. Da
kein Permanentmagnet verbaut wird, sind keine Seltenerdmetalle, wie z.B. Neodym,
notwendig.
Nachteile:
Magnetisierungsstrom im Umrichter und die höheren Verluste in Halbleitern,
Zuleitungen und Motorwicklung.Die hohe Belastung der Halbleiterschalter bedeutet, dass der Umrichter
überdimensioniert ausgeführt sein muss. Hohe Fertigungskosten ergeben sich durch
den notwendig kleinen Luftspalt (wenige Zehntel-Millimeter). Dadurch besteht
auch die Gefahr des Anstreifens. Außerdem entwickelt der Reluktanzmotor
erhebliche Geräusche.
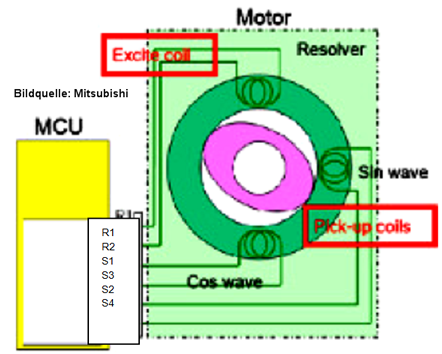
Der Motor benötigt einen Rotorlagegeber (Rotorlagensensor) zur
Drehrichtungserkennung.Quellen:
Animation: By
urа@privod.net.ua
http://privod.net.ua/toppage10.htm [see page for license], via
Wikimedia Commons
|